 โครงการ
โครงการ.jpg) การแก้ปัญหา
การแก้ปัญหา บริการ
บริการ ข่าว
ข่าว เกี่ยวกับเรา
เกี่ยวกับเรา









-
ภาพรวมผลิตภัณฑ์
-
รายละเอียดผลิตภัณฑ์
-
ดาวน์โหลดข้อมูล
-
สินค้าที่เกี่ยวข้อง




YCQR2 Soft Starter
ติดต่อเรา
รายละเอียดผลิตภัณฑ์
ฟังก์ชั่นของ YCQR2 Soft Starter
1. เครื่องชิปเดี่ยวสองตัวควบคุมระบบดิจิตอลอัตโนมัติ;
2. พารามิเตอร์เช่นการเริ่มต้นแรงบิดแรงดันไฟฟ้าและเวลาที่จะตั้งค่าตามโหลดที่แตกต่างกันเพื่อให้ได้คุณสมบัติการควบคุมแรงบิดที่ดีที่สุด
3. กระบวนการเริ่มต้นที่ราบรื่นและค่อยเป็นค่อยไปเพื่อลดความแข็งแรงของแรงกระแทกของเครือข่ายไฟฟ้าการสั่นสะเทือนและเสียงรบกวนของอุปกรณ์เพื่อยืดอายุการใช้งานของไดรเวอร์เชิงกลและเพื่อปรับปรุงสภาพแวดล้อมการทำงาน
4. กระแสเริ่มต้นสามารถปรับได้ตามโหลดเพื่อลดการบริโภคเริ่มต้นและเพื่อสร้างแรงบิดที่ดีที่สุดด้วยกระแสที่เล็กที่สุด
5. ฟังก์ชั่นการหยุดอ่อน - ทำให้อายุการใช้งานที่ยาวนานของการสัมผัสไฟฟ้าตรงตามข้อกำหนดทางกลภายใต้โอกาสต่าง ๆ
6. การป้องกันที่มากเกินไปการป้องกันการโอเวอร์โหลดและการป้องกันความร้อนการป้องกันระยะห่างจากเฟส
7. อินเทอร์เฟซ Extrocontrol เพื่ออำนวยความสะดวกมัลติฟังก์ชั่น: การเริ่มต้นล่าช้าดิจิตอล, อินพุตการควบคุมหยุดชั่วคราวชั่วคราว, การเริ่มต้นของรีเลย์ล่าช้าเวลา, เอาต์พุตรีเลย์ความผิดพลาด
8. ไม่มีข้อกำหนดพิเศษเกี่ยวกับลำดับเฟสไปยังพลังงานอินพุต
9. หยุดฟรีและหยุดอ่อนเวลาหยุดอ่อนสามารถปรับได้
10. การควบคุมดิจิตอลและการควบคุมแบบดิจิตอลที่สมบูรณ์
11. อินเทอร์เฟซมาตรฐาน 485
12. เอาต์พุต 0-20MA กระแสอะนาล็อก
13. โครงสร้างที่เป็นนวัตกรรมปริมาณขนาดเล็กประสิทธิภาพที่มั่นคงการติดตั้งและการทำงานที่ง่าย
14. เครื่องชิปเดี่ยวประเภทฮาร์วาร์ดมีความสามารถในการต่อต้านการเกิดการเกิดจากระบบควบคุมที่แข็งแกร่งเพื่อป้องกันระบบควบคุมจากการหยุดชะงักของไฟฟ้าอย่างรุนแรง
ข้อมูลทางเทคนิค
| หมายเลขรายการ | YCQR2 | |
| พลังงานมอเตอร์ไฟฟ้า (400V.H)/kW | 5.5-600kW | |
| ให้คะแนนการทำงานเป็นกระแส IE/A | 10-1200 | |
| คะแนนแรงดันไฟฟ้าทำงาน / v | 380V ± 15% | |
| ความถี่ /Hz | 50Hz | |
| กระแสงานต่อเนื่อง /ก | 115% เช่น | |
| แรงดันไฟฟ้าควบคุม/V | AC 220V-240V/50Hz | |
| อุณหภูมิแวดล้อม /℃ | 30 ℃/55 ℃ | |
ตารางฟังก์ชั่นตารางและคำอธิบายพารามิเตอร์
| การทำงาน | กำหนดช่วง | มูลค่าโรงงาน | การส่องสว่าง | |||
| รหัส | ชื่อ | |||||
| 0 | เริ่มแรงดันไฟฟ้า | 30-80% | 30% | โหมดแรงดันไฟฟ้ามีประสิทธิภาพ | ||
| 1 | เวลาที่เพิ่มขึ้น | 0-60S | 10s | โหมดแรงดันไฟฟ้ามีประสิทธิภาพ | ||
| 2 | เวลาหยุดนุ่ม | 0-60S | 2S | หยุดอย่างอิสระเมื่อตั้งค่าเป็น 0 | ||
| 3 | เริ่มล่าช้า | 0-240S | 0S | สองบรรทัดมีประสิทธิภาพ | ||
| 4 | จำกัด การเริ่มต้นปัจจุบัน | 150-500% | 250% | การ จำกัด โหมดปัจจุบันมีประสิทธิภาพ | ||
| 5 | ความล่าช้าระหว่างกัน | 0-240S | 0S | |||
| 6 | ชุดหยุดชั่วคราว | 00-1 | 0 | 0: ใช่ 1: ไม่ | ||
| 7 | รีสตาร์ทหลังจากหยุดชั่วคราว | 00-1 | 0 | 0: ใช่ 1: ไม่ | ||
| 8 | โหมดควบคุม | 00-1 | 1 | 0: จำกัด กระแส 1: แรงดันไฟฟ้า | ||
| 9 | วิธีควบคุม | 1-6 | 1 | 1: แป้นพิมพ์ 2: การควบคุมภายนอก 3: แป้นพิมพ์+การควบคุมภายนอก 4: พีซี 5: พีซี+คีย์บอร์ด 6: PC+Outer Control | ||
| A | 0-20MA | 00-1 | 0 | 0: เต็มสเกล (20ma) สอดคล้องกับ 400% 1: เต็มมาตราส่วน (20ma) ที่สอดคล้องกับ 130% | ||
| B | โหมดแสดงผล | 0-132 | 0 | 0: ร้อยละของแรงดันไฟฟ้าที่ได้รับการจัดอันดับ xxx: ค่าพลังงานที่ได้รับการจัดอันดับจริง | ||
| C | ที่อยู่ท้องถิ่น | 1-30 | 0 | สำหรับการสื่อสารแบบอนุกรม-พอร์ต | ||
| D | ตั้งค่าการปรับเปลี่ยนพารามิเตอร์ | 00-1 | 0 | 0: ใช่ 1: ไม่ | ||
| E | โอเวอร์โหลดหลายชุด | 50-200% | 150% | |||
| F | การป้องกันนอกเฟส | 00-1 | 0 | 0: ใช่ 1: ไม่ | ||
| EY | การปรับเปลี่ยนชุดการป้องกัน | ไม่ควรแก้ไขข้อมูลในเงื่อนไขนี้ | ||||
| -A | เริ่มต้นและเพิ่มสภาพ | 1. การแสดงมูลค่าปัจจุบัน XXXA หรือเปอร์เซ็นต์ของค่าอัตรา 2. เวลาเริ่มต้นแสดงเวลา eottt | ||||
| -A | สภาพการทำงาน | |||||
| -A | สภาพหยุดนุ่ม | |||||
หมายเหตุ: ค่า XO-9
แม้ว่าจะใช้โหมดแรงดันไฟฟ้ากระแส จำกัด ยังคงมีประสิทธิภาพและค่าของมันคือ 400%
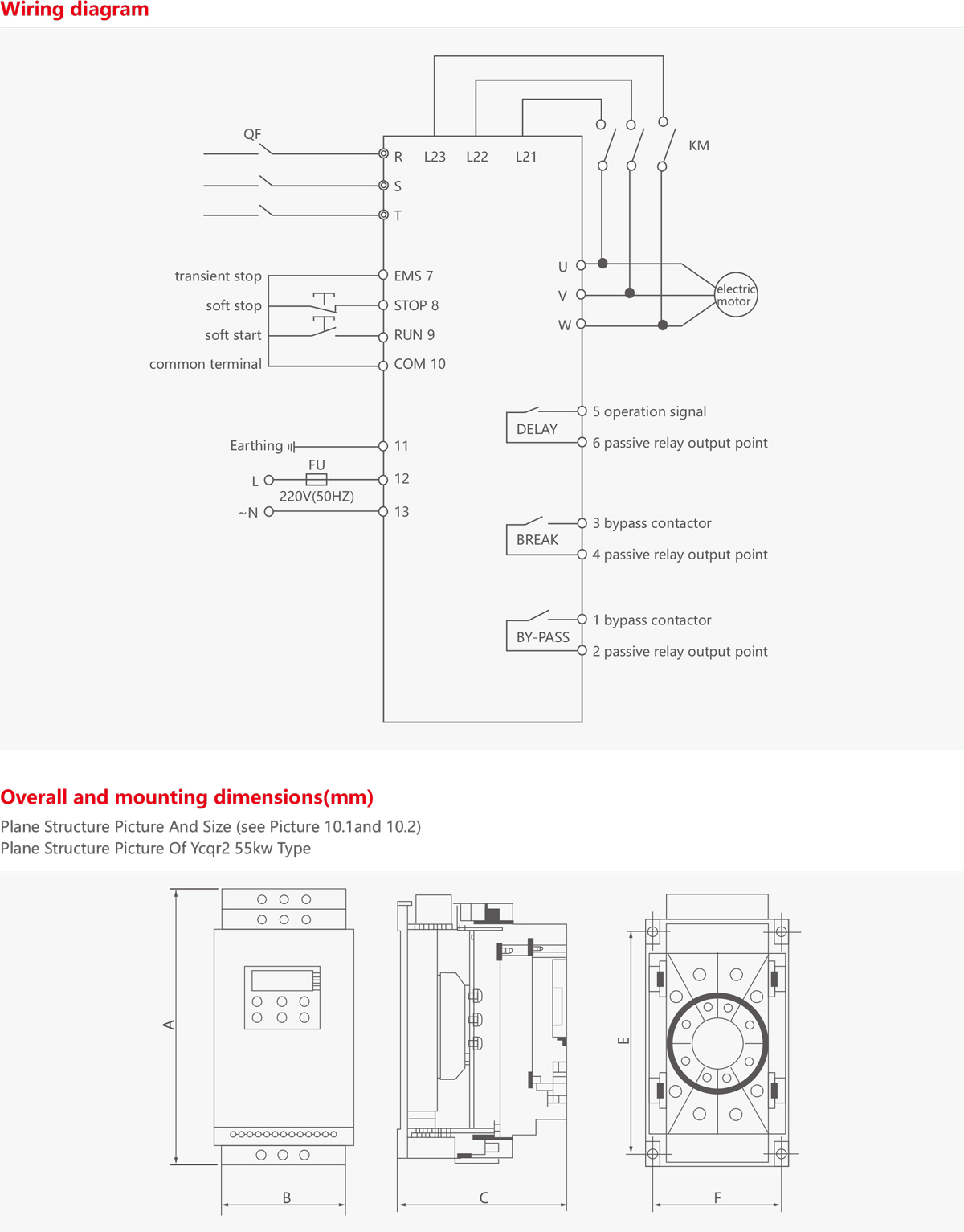
ประเภท YCQ2R 55KW
| แบบอย่าง | พลัง (kw) | จัดอันดับปัจจุบัน (a) | ขนาดโครงร่าง (มม.) | การติดตั้งขนาด (มม.) | การติดตั้งหลุม มิติ | |||||||||||
| A | B | C | E | F | ||||||||||||
| YCQR2 | 5. 5-22 | 10-40 | 265 | 154 | 165 | 219 | 140 | φ6 | ||||||||
| YCQR2 | 30 | 54 | 265 | 154 | 165 | 219 | 140 | φ6 | ||||||||
| YCQR2 | 37 | 68 | 265 | 154 | 165 | 219 | 140 | φ6 | ||||||||
| YCQR2 | 45 | 80 | 265 | 154 | 165 | 219 | 140 | φ6 | ||||||||
| YCQR2 | 55 | 100 | 265 | 154 | 165 | 219 | 140 | φ6 | ||||||||

| แบบอย่าง | พลัง (kw) | จัดอันดับปัจจุบัน (a) | ขนาดโครงร่าง (มม.) | การติดตั้งขนาด (มม.) | การติดตั้งหลุม มิติ | ||||||||||||
| A | B | C | E | F | |||||||||||||
| YCQR2 | 75 | 135 | 531 | 260 | 204 | 380 | 230 | φ8 | |||||||||
| YCQR2 | 90 | 160 | 531 | 260 | 204 | 380 | 230 | φ8 | |||||||||
| YCQR2 | 115 | 200 | 531 | 260 | 204 | 380 | 230 | φ8 | |||||||||
| YCQR2 | 132 | 250 | 531 | 260 | 204 | 380 | 230 | φ8 | |||||||||
| YCQR2 | 160 | 300 | 531 | 260 | 204 | 380 | 230 | φ8 | |||||||||
| YCQR2 | 200 | 360 | 564 | 290 | 204 | 260 | 260 | φ8 | |||||||||
| YCQR2 | 250 | 450 | 564 | 290 | 204 | 260 | 260 | φ8 | |||||||||
| YCQR2 | 320 | 560 | 564 | 290 | 204 | 260 | 260 | φ8 | |||||||||
| YCQR2 | 400 | 800 | 600 | 350 | 220 | 480 | 320 | φ8 | |||||||||
| YCQR2 | 500 | 1,000 | 600 | 350 | 220 | 480 | 320 | φ8 | |||||||||
| YCQR2 | 600 | 1200 | 600 | 350 | 220 | 480 | 320 | φ8 | |||||||||

สินค้าที่เกี่ยวข้อง
-
 สวิตช์ จำกัด XCK-Jรายการข้อมูลทางเทคนิคโหมด XCK-J ฉนวนสองเท่าตามมาตรฐาน EN50041 2 ขั้วต่อขั้วต่อขั้วหัวโลหะชนิด directicting ประเภท meta เหล็กกล้าเหล็กชนิด directing ประเภทโลหะเทอร์โมพลาสติกลูกกลิ้งเทอร์โมไลท์การเคลื่อนที่ของเทอร์โมไลท์ Multidire ...
สวิตช์ จำกัด XCK-Jรายการข้อมูลทางเทคนิคโหมด XCK-J ฉนวนสองเท่าตามมาตรฐาน EN50041 2 ขั้วต่อขั้วต่อขั้วหัวโลหะชนิด directicting ประเภท meta เหล็กกล้าเหล็กชนิด directing ประเภทโลหะเทอร์โมพลาสติกลูกกลิ้งเทอร์โมไลท์การเคลื่อนที่ของเทอร์โมไลท์ Multidire ... -
 สวิตช์ไมโคร V-15รายการข้อมูลทางเทคนิคความเร็วการทำงานความเร็ว 0.1 มม. ถึง 1 ม./วินาทีความถี่การกระทำเชิงกล: 600 ครั้ง/นาทีการเลือกตั้ง: 60 ครั้ง/ความต้านทานการสัมผัสระหว่าง15mΩ (เริ่มต้น) ความต้านทานฉนวน100mΩเหนือ (ที่ 500VDC) แรงดันไฟฟ้าที่ไม่ต้องสัมผัส: 1000VAC, 50/60Hz 10 ถึง 55Hz: 1.5 มม. คู่สวิงแอ็คชั่นแอ็คชั่น: 400 ม. ...
สวิตช์ไมโคร V-15รายการข้อมูลทางเทคนิคความเร็วการทำงานความเร็ว 0.1 มม. ถึง 1 ม./วินาทีความถี่การกระทำเชิงกล: 600 ครั้ง/นาทีการเลือกตั้ง: 60 ครั้ง/ความต้านทานการสัมผัสระหว่าง15mΩ (เริ่มต้น) ความต้านทานฉนวน100mΩเหนือ (ที่ 500VDC) แรงดันไฟฟ้าที่ไม่ต้องสัมผัส: 1000VAC, 50/60Hz 10 ถึง 55Hz: 1.5 มม. คู่สวิงแอ็คชั่นแอ็คชั่น: 400 ม. ... -
 LE1 Magnetic Starterเงื่อนไขการทำงานและการติดตั้ง 1. อุณหภูมิอากาศโดยรอบ: -5 ℃ ~ +40 ℃อุณหภูมิเฉลี่ย 24 ชั่วโมงต้องต่ำกว่า +35 ℃ 2. ระดับความสูง: ≤2000m 3. ความชื้นสัมพัทธ์: อุณหภูมิสูงสุด 40 องศาความชื้นสัมพัทธ์ไม่เกิน 50% 90%. หากความชื้นเปลี่ยนไปเป็นผลมาจาก ...
LE1 Magnetic Starterเงื่อนไขการทำงานและการติดตั้ง 1. อุณหภูมิอากาศโดยรอบ: -5 ℃ ~ +40 ℃อุณหภูมิเฉลี่ย 24 ชั่วโมงต้องต่ำกว่า +35 ℃ 2. ระดับความสูง: ≤2000m 3. ความชื้นสัมพัทธ์: อุณหภูมิสูงสุด 40 องศาความชื้นสัมพัทธ์ไม่เกิน 50% 90%. หากความชื้นเปลี่ยนไปเป็นผลมาจาก ... -
 AD16 สัญญาณตัวบ่งชี้ดิจิตอลเครื่องวัดดิจิตอล
AD16 สัญญาณตัวบ่งชี้ดิจิตอลเครื่องวัดดิจิตอล -
 Contactor") คอนแทคเตอร์ CJ19I (CJ19S)โครงสร้างผลิตภัณฑ์ทั่วไปคอนแทคเตอร์ CJ19I สำหรับการสลับตัวเก็บประจุ (ต่อไปนี้เรียกว่าคอนแทคเตอร์) เหมาะสำหรับวงจร AC 50Hz/60Hz พร้อมแรงดันไฟฟ้าที่ได้รับการจัดอันดับสูงสุด 690V ส่วนใหญ่จะใช้เพื่อเพิ่มอุปกรณ์ชดเชยพลังงานปฏิกิริยาแรงดันไฟฟ้าต่ำหรือตัดความแปรปรวนแบบขนานแรงดันต่ำ ...
คอนแทคเตอร์ CJ19I (CJ19S)โครงสร้างผลิตภัณฑ์ทั่วไปคอนแทคเตอร์ CJ19I สำหรับการสลับตัวเก็บประจุ (ต่อไปนี้เรียกว่าคอนแทคเตอร์) เหมาะสำหรับวงจร AC 50Hz/60Hz พร้อมแรงดันไฟฟ้าที่ได้รับการจัดอันดับสูงสุด 690V ส่วนใหญ่จะใช้เพื่อเพิ่มอุปกรณ์ชดเชยพลังงานปฏิกิริยาแรงดันไฟฟ้าต่ำหรือตัดความแปรปรวนแบบขนานแรงดันต่ำ ... -
 DH48J, DH48S-S TIME RELAYหมายเลขรายการแรงดันไฟฟ้า DC12V-48V AC12V-380V 50Hz การนับวิธีการสะสมช่วงการนับ 1-9999 (× 1 × 10 × 100) หน้าสัมผัสอินพุตหรือสวิตช์อินพุตอินพุตโฟโต DC28V 3A อุณหภูมิการทำงาน -10 ℃ ~ 50 ℃ความชื้น 35% ~ 85% ชีวิต Mech: 107Elec: 103 ...
DH48J, DH48S-S TIME RELAYหมายเลขรายการแรงดันไฟฟ้า DC12V-48V AC12V-380V 50Hz การนับวิธีการสะสมช่วงการนับ 1-9999 (× 1 × 10 × 100) หน้าสัมผัสอินพุตหรือสวิตช์อินพุตอินพุตโฟโต DC28V 3A อุณหภูมิการทำงาน -10 ℃ ~ 50 ℃ความชื้น 35% ~ 85% ชีวิต Mech: 107Elec: 103 ...








-

-

-

ที่อยู่:CNC High-Tech Hutou Industrial Zone, Liushi Town, Yueqing, Wenzhou Ctity, China



สินค้าร้อน - แผนผังไซต์ - แอมป์มือถือ
3 เฟสเริ่มต้น, 6a elcb, MPCB, MCCB Microprocessor, 250amp McCb Circuit Breaker, 3p AC MCB,
