 Proyek
Proyek.jpg) Solusi
Solusi Layanan
Layanan Berita
Berita Tentang kami
Tentang kami









-
Tinjauan Produk
-
Detail Produk
-
Unduh Data
-
Produk terkait




Starter lunak ycqr2
Hubungi kami
Detail Produk
Fungsi starter lunak YCQR2
1. Kontrol Digital Otomatis Mesin Single-Chip Ganda;
2. Parameter seperti memulai arus torsi, tegangan, dan waktu yang akan ditetapkan sesuai dengan beban yang berbeda, untuk mendapatkan fitur kontrol torsi yang optimal.
3. Proses awal yang halus dan bertahap, untuk mengurangi kekuatan dampak jaringan listrik, getaran dan kebisingan peralatan, untuk memperpanjang seumur hidup driver mekanik dan untuk meningkatkan lingkungan kerja.
4. Mulai arus dapat disesuaikan sesuai beban, untuk mengurangi konsumsi awal dan untuk membuat torsi optimal dengan arus terkecil.
5. Fungsi Soft Stop - Buat kontak listrik seumur hidup yang panjang, memenuhi persyaratan mekanis dalam berbagai kesempatan.
6. Perlindungan over-arus, perlindungan kelebihan beban dan perlindungan termal, perlindungan keluar-fase.
7. Antarmuka Ekstrokontrol Untuk memfasilitasi multi-fungsi: Digital Tertunda Mulai, Input Kontrol Stop Transient, Output Mulai dari Relai Penundaan Waktu, Output Relai Kesalahan.
8. Tidak ada persyaratan khusus pada urutan fase ke daya input.
9. Berhenti Gratis dan Berhenti Lembut, Waktu Berhenti Lembut Dapat Disesuaikan.
10. Kontrol Digital Lengkap dan Ekstrokontrol
11. Antarmuka Standar 485
12. Output 0-20MA Arus analog
13. Struktur inovatif, volume kecil, kinerja stabil, instalasi dan operasi yang mudah.
14. Jenis Harvard Mesin chip tunggal memiliki kapasitas anti-interupsi yang kuat untuk mencegah sistem kontrol dari gangguan listrik yang parah.
Data teknis
| Item No. | Ycqr2 | |
| Daya Motor Listrik (400V.H)/KW | 5.5-600KW | |
| Nilai Kerja saat ini IE/a | 10-1200 | |
| Tegangan Kerja Dinilai / V | 380V ± 15% | |
| Frekuensi /Hz | 50Hz | |
| Arus kerja berkelanjutan /a | 115% yaitu | |
| Tegangan Kontrol Nilai/V. | AC 220V-240V/50Hz | |
| Suhu sekitar /℃ | 30 ℃/55 ℃ | |
Tabel kode fungsi dan deskripsi parameter
| Fungsi | Set rentang | Nilai pabrik | Penerangan | |||
| Kode | Nama | |||||
| 0 | Mulai tegangan | 30-80% | 30% | Mode tegangan efektif | ||
| 1 | Waktu naik | 0-60S | 10s | Mode tegangan efektif | ||
| 2 | Waktu berhenti lembut | 0-60S | 2S | Berhenti bebas saat diatur sebagai 0 | ||
| 3 | Mulai penundaan | 0-240S | 0S | Dua baris cara yang efektif | ||
| 4 | Membatasi Mulai Saat Ini | 150-500% | 250% | Membatasi mode saat ini efektif | ||
| 5 | Keterlambatan interlock | 0-240S | 0S | |||
| 6 | Set stop transient | 00-1 | 0 | 0: Ya 1: Tidak | ||
| 7 | Mulai ulang setelah berhenti sementara | 00-1 | 0 | 0: Ya 1: Tidak | ||
| 8 | Mode kontrol | 00-1 | 1 | 0: Membatasi Arus 1: Tegangan | ||
| 9 | Cara kontrol | 1-6 | 1 | 1: Keyboard 2: Kontrol Luar 3: Keyboard+Kontrol Luar 4: PC 5: PC+keyboard 6: PC+Kontrol Luar | ||
| A | 0-20mA | 00-1 | 0 | 0: Skala Penuh (20mA) sesuai dengan 400% 1: skala penuh (20mA) sesuai dengan 130% | ||
| B | Mode tampilan | 0-132 | 0 | 0: dengan persentase tegangan pengenal XXX: Nilai Daya Nilai Aktual | ||
| C | Alamat lokal | 1-30 | 0 | Untuk komunikasi serial-port | ||
| D | Atur modifikasi parameter | 00-1 | 0 | 0: Ya 1: Tidak | ||
| E | Kelebihan banyak set | 50-200% | 150% | |||
| F | Perlindungan di luar fase | 00-1 | 0 | 0: Ya 1: Tidak | ||
| EY | Perlindungan Set Modifikasi | Data tidak boleh dimodifikasi dalam kondisi ini | ||||
| -A | Kondisi Mulai dan Meningkat | 1. menampilkan nilai saat ini XXXA atau persen dari nilai tarif. 2. Waktu mulai hari ini menampilkan waktu eottt | ||||
| -A | Kondisi operasi | |||||
| -A | Kondisi berhenti lunak | |||||
Catatan: Nilai xo-9
Bahkan jika menggunakan mode tegangan, arus pembatas masih efektif, dan nilainya adalah 400%.
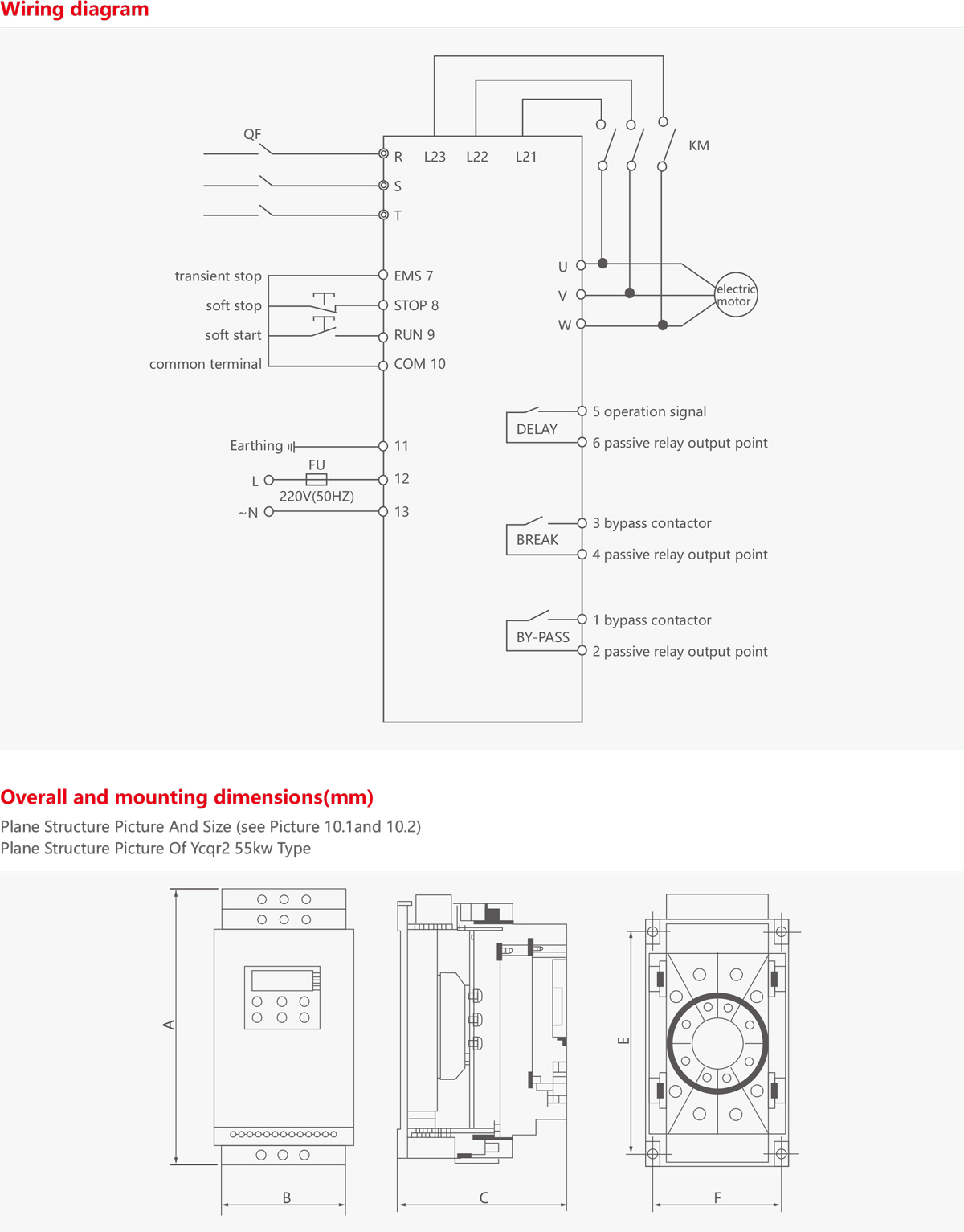
Jenis YCQ2R 55KW
| Model | Kekuatan (KW) | Nilai arus (A) | Ukuran garis besar (mm) | Pemasangan ukuran (mm) | Memasang lubang Dimensi | |||||||||||
| A | B | C | E | F | ||||||||||||
| Ycqr2 | 5. 5-22 | 10-40 | 265 | 154 | 165 | 219 | 140 | Φ6 | ||||||||
| Ycqr2 | 30 | 54 | 265 | 154 | 165 | 219 | 140 | Φ6 | ||||||||
| Ycqr2 | 37 | 68 | 265 | 154 | 165 | 219 | 140 | Φ6 | ||||||||
| Ycqr2 | 45 | 80 | 265 | 154 | 165 | 219 | 140 | Φ6 | ||||||||
| Ycqr2 | 55 | 100 | 265 | 154 | 165 | 219 | 140 | Φ6 | ||||||||

| Model | Kekuatan (KW) | Nilai arus (A) | Ukuran garis besar (mm) | Pemasangan ukuran (mm) | Memasang lubang Dimensi | ||||||||||||
| A | B | C | E | F | |||||||||||||
| Ycqr2 | 75 | 135 | 531 | 260 | 204 | 380 | 230 | Φ8 | |||||||||
| Ycqr2 | 90 | 160 | 531 | 260 | 204 | 380 | 230 | Φ8 | |||||||||
| Ycqr2 | 115 | 200 | 531 | 260 | 204 | 380 | 230 | Φ8 | |||||||||
| Ycqr2 | 132 | 250 | 531 | 260 | 204 | 380 | 230 | Φ8 | |||||||||
| Ycqr2 | 160 | 300 | 531 | 260 | 204 | 380 | 230 | Φ8 | |||||||||
| Ycqr2 | 200 | 360 | 564 | 290 | 204 | 260 | 260 | Φ8 | |||||||||
| Ycqr2 | 250 | 450 | 564 | 290 | 204 | 260 | 260 | Φ8 | |||||||||
| Ycqr2 | 320 | 560 | 564 | 290 | 204 | 260 | 260 | Φ8 | |||||||||
| Ycqr2 | 400 | 800 | 600 | 350 | 220 | 480 | 320 | Φ8 | |||||||||
| Ycqr2 | 500 | 1000 | 600 | 350 | 220 | 480 | 320 | Φ8 | |||||||||
| Ycqr2 | 600 | 1200 | 600 | 350 | 220 | 480 | 320 | Φ8 | |||||||||

Produk terkait
-
 Sakelar batas xck-jTechnical data Item XCK-J mode double insulation, according to standard EN50041 2-pole conact terminal Quick Metal head directacting type Meta steel-roller directacting type Metal thermoplastic roller tumbler directating type Adjustable length and thermoplastic rooler tumbler type Metal thermoplastic cylindrical tumbler type Diameter=6mm Length=200mm Thermoplastic roller tumbler directacting type, Single direction with horizontal movement Multidire...
Sakelar batas xck-jTechnical data Item XCK-J mode double insulation, according to standard EN50041 2-pole conact terminal Quick Metal head directacting type Meta steel-roller directacting type Metal thermoplastic roller tumbler directating type Adjustable length and thermoplastic rooler tumbler type Metal thermoplastic cylindrical tumbler type Diameter=6mm Length=200mm Thermoplastic roller tumbler directacting type, Single direction with horizontal movement Multidire... -
 Sakelar Mikro V-15Technical data Item Data Operation speed 0.1mm to 1m/Sec Action frequency Mechanical: 600 times/minute Electical: 60 times/Minute Contact resistance Under 15mΩ(initial) Insulation resistance 100mΩ above(at 500VDC) Bearing voltage Non-contact end: 1000VAC, 50/60Hz for one minute Current parts and noncurrent parts and end and connect opsition: 1500VAC, 50/60Hz for one minute Vibration 1.5mm 10 ke 55Hz: 1,5mm pasang swing aksi memukul mesin: 400m ...
Sakelar Mikro V-15Technical data Item Data Operation speed 0.1mm to 1m/Sec Action frequency Mechanical: 600 times/minute Electical: 60 times/Minute Contact resistance Under 15mΩ(initial) Insulation resistance 100mΩ above(at 500VDC) Bearing voltage Non-contact end: 1000VAC, 50/60Hz for one minute Current parts and noncurrent parts and end and connect opsition: 1500VAC, 50/60Hz for one minute Vibration 1.5mm 10 ke 55Hz: 1,5mm pasang swing aksi memukul mesin: 400m ... -
 Starter magnetik le1Kondisi Operasi dan Pemasangan 1. Suhu Udara Ambient: -5 ℃ ~ +40 ℃ , Suhu rata-rata 24 jam harus di bawah +35 ℃ 2. Ketinggian: ≤2000m 3. Kelembaban relatif: suhu maksimum 40 derajat, kelembaban relatif yang tidak ada pada rata-rata bulan yang lebih rendah, pada suhu yang lebih rendah, yang lebih rendah, yang lebih rendah. 90%. Jika kelembaban berubah sebagai akibat dari ...
Starter magnetik le1Kondisi Operasi dan Pemasangan 1. Suhu Udara Ambient: -5 ℃ ~ +40 ℃ , Suhu rata-rata 24 jam harus di bawah +35 ℃ 2. Ketinggian: ≤2000m 3. Kelembaban relatif: suhu maksimum 40 derajat, kelembaban relatif yang tidak ada pada rata-rata bulan yang lebih rendah, pada suhu yang lebih rendah, yang lebih rendah, yang lebih rendah. 90%. Jika kelembaban berubah sebagai akibat dari ... -
 AD16 Sinyal Digital Digital Meter Digital
AD16 Sinyal Digital Digital Meter Digital -
 Contactor") Kontaktor CJ19I (CJ19S)Struktur Produk Umum Kontaktor CJ19i untuk switching kapasitor (selanjutnya disebut kontaktor) cocok untuk sirkuit AC 50Hz/60Hz dengan tegangan pengenal pengenal hingga 690V. Ini terutama digunakan untuk menambahkan peralatan kompensasi daya reaktif tegangan rendah atau memotong kapasit paralel tegangan rendah ...
Kontaktor CJ19I (CJ19S)Struktur Produk Umum Kontaktor CJ19i untuk switching kapasitor (selanjutnya disebut kontaktor) cocok untuk sirkuit AC 50Hz/60Hz dengan tegangan pengenal pengenal hingga 690V. Ini terutama digunakan untuk menambahkan peralatan kompensasi daya reaktif tegangan rendah atau memotong kapasit paralel tegangan rendah ... -
 Dh48J, Dh48s-Time RelayItem No. Tegangan Data DC12V-48V AC12V-380V 50Hz Metode Penghitungan Metode Penghitungan Rentang Penghitungan 1-9999 (× 1 × 10 × 100) Kontak Input atau Input Input Sakelar Sakelar Bergantian Sakelar Penghitungan Kapasitas Penghitungan Sakelar Pra-Penetapan Kapasitas Kontak AC220V 3A; DC28V 3A Suhu Operasi -10 ℃ ~ 50 ℃ Kelembaban 35% ~ 85% Life Mech: 107elec: 103 ...
Dh48J, Dh48s-Time RelayItem No. Tegangan Data DC12V-48V AC12V-380V 50Hz Metode Penghitungan Metode Penghitungan Rentang Penghitungan 1-9999 (× 1 × 10 × 100) Kontak Input atau Input Input Sakelar Sakelar Bergantian Sakelar Penghitungan Kapasitas Penghitungan Sakelar Pra-Penetapan Kapasitas Kontak AC220V 3A; DC28V 3A Suhu Operasi -10 ℃ ~ 50 ℃ Kelembaban 35% ~ 85% Life Mech: 107elec: 103 ...








-

-

-

Alamat:Zona Industri Hutou Teknologi Tinggi CNC, Kota Liushi, Yueqing, Wenzhou Ctity, Cina



Produk panas - Sitemap - AMP Mobile
3 fase starter, 6a elcb, MPCB, Berbasis mikroprosesor MCCB, Pemutus sirkuit 250amp mccb, 3P AC MCB,
